工法の概要
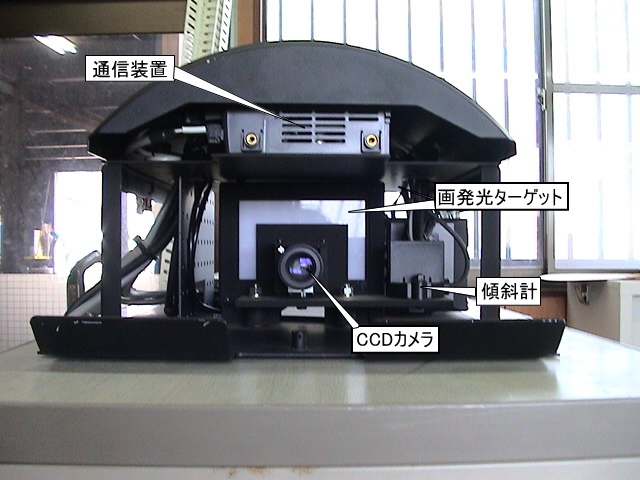
シールド掘進機と後続する推進管内にLED、CCDカメラを内蔵した中継ユニットを複数配置し、中継ユニット自体から発光するLEDの位置を、前後に位置する中継ユニットのCCDカメラが捉えた画像をもとに算出した偏位角により、発進立坑から掘進機本体までをトラバースで結び、掘進機の位置を三次元座標として算出する。
水レベル計による掘進機の高低及び電磁波による掘進機の位置測量も装備しております。
水レベル計による掘進機の高低及び電磁波による掘進機の位置測量も装備しております。

両方向CCDカメラ内蔵中継ユニット